„Test and Evaluation of Tethered Airfoils“ – kurz: TETA. Was sich etwas kryptisch liest, ist der bis dato spannendste und komplexeste Versuchsaufbau, flexible Tragflächen valide zu vermessen. Kite-Designer Ralf Grösel und ein Team aus Wissenschaftlern der TU Berlin drücken erstmals Grundzug, Haltekräfte und Depower-Fähigkeit in konkreten Zahlen aus – mit überraschenden Erkenntnissen.

Auf der Suche nach dem perfekten Testverfahren
Ständig werden Kites getestet. Von uns Entwicklern, von Teamfahrern, von Magazinen, von den Kunden am Strand. Und immer spielen dabei subjektive Faktoren eine Rolle. Mit viel Erfahrung und einem feinen Händchen kann man sich in seinen Aussagen vielleicht der Realität annähern, doch Gewissheit bringen nur wissenschaftliche Messungen. Und die sind extrem aufwendig und kompliziert – insbesondere wenn es sich um eine flexible Konstruktion wie einen Kite handelt. Man stelle sich mal vor: Tester könnten Kite-Modelle unterschiedlicher Hersteller komplett analytisch gegeneinander vergleichen in einer Art und Weise, wie man das zum Beispiel aus dem Automobilsektor kennt. Dort gibt es für fast alles eine Messmethode. Es würden Daten vorliegen, die einen Vergleich wesentlich objektiver erscheinen lassen als die meist subjektiven Fahreindrücke der Kiter oder Magazintests. Kurz: Wir hätten Fakten auf dem Tisch.
Aus meiner Sicht, der des Kite-Designers für Duotone Kiteboarding, ist diese Vorstellung ein wahr gewordener Traum. Mitte 2013 bekam ich die Anfrage von TETA-Projektleiter Jan Hummel und Sebastian Wendel von der TU Berlin, ob ich als Berater an dem Projekt partizipieren möchte. Bei unserem ersten Gespräch stand ich dem Projekt recht skeptisch gegenüber, da der Grad der Komplexität wirklich sehr hoch ist. Aus den Augen des Designers brachte ich meine Bedenken und Einwände vor und erklärte, auf welche Parameter ich in der Entwicklung am meisten Wert lege. Denn was nützt eine Fülle von Daten, wenn diese letztlich nicht relevant oder übertragbar für die Entwicklung von Kites sind?

Die Geburt von TETA
So endete das erste Gespräch mit der Erkenntnis, dass einige der vorgebrachten Ideen und Ansätze nicht wirklich zielführend erschienen. Innerlich war ich mir sicher, ich sehe Jan und Sebastian so schnell nicht wieder. Der notwendige Versuchsaufbau, um tatsächlich verwertbare Daten zu erheben, ist derartig komplex, dass ich an eine Umsetzung nicht zu glauben wagte. Tja, weit gefehlt, zwei Monate später erhielt ich einen Anruf von Jan, der mir versicherte, dass sie nun alle nötigen Änderungen durchdacht hätten und bereit wären für die zweite Runde in unserem Gesprächskreis. Es folgte die Ausarbeitung der relevanten Parameter, die sowohl für die Kite-Entwicklung als auch für die Vergleichbarkeit der Modelle untereinander relevant sind.
6 Jahre, 20.000 Arbeitsstunden, 8 Master- und 10 Bachelorarbeiten sowie die Dissertation von Jan Hummel später ernten wir nun die Früchte dieses Projekts. Jan hat mittlerweile das Projekt an Christoph Elfert übergeben, der die nächste Entwicklungsstufe realisiert.
Der Prüfstand
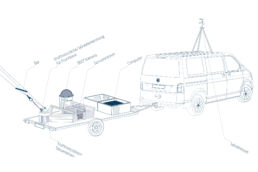
Für die Durchführung der Messungen muss der Kite natürlich umströmt werden. Daher wurde ein fahrender Prüfstand entwickelt, der den benötigten Wind quasi selbst erzeugt. Die Windgeschwindigkeit ist ein primärer Faktor, der oberhalb des Autodachs gemessen wird, und entspricht, kein Wind vorausgesetzt, der Fahrtgeschwindigkeit des Fahrzeugs. Da die Messfahrten im Freien durchgeführt werden und immer mit einer weiteren Windkomponente gerechnet werden muss, werden Windgeschwindigkeit und Windrichtung separat aufgezeichnet und den Messdaten zugeordnet. Auf einem Anhänger hinter dem Fahrzeug ist der eigentliche Prüfstand aufgebaut. Hier sind die Komponenten wie Computer, Controller für die Servomotoren, die Akkus, eine 360-Grad-Kamera zur Lage- und Positionserfassung sowie die Kraftmessdosen und Winkelsensoren für Front- und Steuerleinen untergebracht.
Der Aufbau ermöglicht es, sowohl Power- als auch Depower- und Steuerleinen-Bewegungen zu realisieren, die identisch mit den Bewegungen während einer Kite-Session sind. Der Bediener des Prüfstands sitzt vor einem großen Monitor, der die Livebilder der Weitwinkelkamera auf dem Dach des Fahrzeugs wiedergibt. Die Steuerbefehle im Inneren des Fahrzeugs werden von der Kite-Bar an Servomotoren übertragen und von Mikroprozessoren digitalisiert. Dieser nun digitale Steuerbefehl wird wiederum an den Prüfstand hinter dem Fahrzeug geschickt. Klingt kompliziert? Ist es auch. Dennoch ist es notwendig, da in der zweiten Phase des Prüfstands die Daten zum autonomen Steuern des Kites direkt über eine interne Software laufen werden. Manuelle Steuereingaben werden dann nicht mehr notwendig sein.
Das Messverfahren und die Messparameter
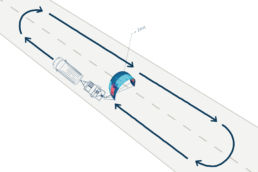
Für die Messungen wird ein stillgelegter Flugplatz genutzt. Da durch das Fahren des Prüfstands der benötigte Wind selbst erzeugt wird, ist es möglich, die Messungen in einer Endlosschleife durchzuführen. Gemessen wird immer auf den parallelen Abschnitten in einer geraden Linie. Zwischen den Wendepunkten steht eine Messstrecke von rund 1,5 Kilometern zur Verfügung, die in circa 132 Sekunden durchfahren wird. Dabei wird der Kite über das Steer-by-Wire-System im Zenit gehalten. Um ein möglichst genaues Ergebnis zu erzielen, wird jede Messung rund 100-mal durchgeführt und dann statistisch gemittelt.
Aktuell können die folgenden Parameter gemessen werden:
- Der Höhenwinkel (zeigt die Position im Windfenster an und kann zur Bestimmung der Höhelaufeigenschaften herangezogen werden)
- Gesamtauftriebskraft im angepowerten Zustand (Bar herangezogen)
- Gesamtauftriebskraft im depowerten Zustand (Bar 50 Zentimeter nach oben geschoben)
- Kräfte in den Frontleinen
- Kräfte in den Steuerleinen
Aus diesen erhobenen Messwerten lässt sich bereits eine sehr interessante Anzahl von Daten zur Vergleichbarkeit unterschiedlicher Kite-Modelle erheben.

Die Messergebnisse
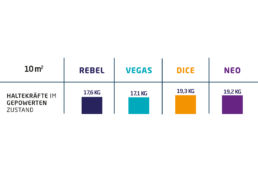
Und jetzt die Zahlen auf den Tisch, die Ergebnisse der Messungen im Detail: Wir vergleichen im Folgenden vier Modelle der Marke Duotone, jeweils in der Größe zehn Quadratmeter aus dem Modelljahr 2018. Sämtliche Messungen wurden bei 22 Knoten (entspricht circa 40,7 km/h) durchgeführt.
Die Kräfte am Kite in der Addition
Der Grundzug ist die Summe aus den Front- und Steuerleinenkräften. Diese Kraft ist ein wichtiger Parameter, um die Fähigkeit des Kites zu beschreiben, den Kiter über das Wasser zu bewegen. Interessant ist es zudem, die Kräfte von Front- und Steuerleinen separat zu betrachten.
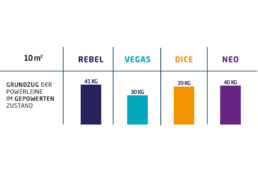
Grundzug der Powerleine im gepowerten Zustand
Die Kraft der Powerleine (oder Frontleine) fühlen wir direkt auf unserem Trapezhaken und wird über das Trapez auf unseren Körper in Form von Zug übertragen.
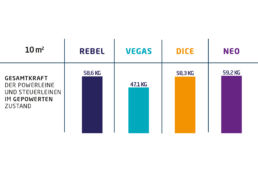
Haltekräfte im gepowerten Zustand
Die Haltekräfte, so sagt es schon der Name, sind die Kräfte, die wir unmittelbar in unseren Armen spüren können, wenn wir die Bar an uns herangezogen halten.
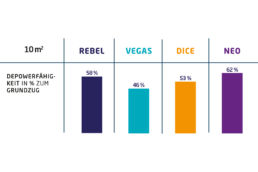
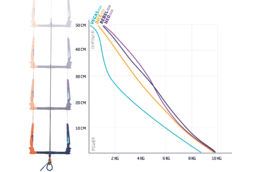
Die Depower-Fähigkeit
Die Depower-Fähigkeit gilt bei vielen Kitern als zentrales Kriterium für einen Kite. Bei einem Depower-Weg von 50 Zentimetern beschreibt dieser prozentuale Wert die Fähigkeit des Kites, die Zugkraft durch Wegschieben der Bar zu reduzieren, also wie viel Zugkraft nach dem Depowern noch übrig ist. Je höher der Wert, umso mehr lässt sich der Kite depowern. Dies bedeutet gleichzeitig, dass ein hoher Wert ein Indiz für einen größeren Windeinsatzbereich ist.
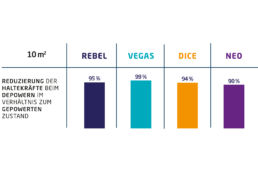
Die Reduzierung der Haltekräfte im depowerten Zustand
Dabei gibt es einen weiteren Aspekt, den wir uns anschauen sollten. Dieser wiederum prozentuale Wert ermöglicht uns einen Einblick in die verbleibenden Haltekräfte, wenn wir die Bar 50 Zentimeter von uns wegschieben.
Was lernen wir daraus?
Wie leicht zu erkennen ist, unterscheidet sich der Vegas, also ein sehr C-shape-ausgelegter Wake- und Freestyle-Kite, signifikant von seinen ungleichen Brüdern Neo, Dice und Rebel. Wir können also aus den Daten ablesen, dass er sich im Grundzug und in den Steuerkräften stark differenziert, indem er deutlich weniger Kräfte generiert. Jetzt werden sich viele fragen: Ist das so gewollt? Ist es! Der Vegas ist ein Nischenprodukt, das primär bei professionellen Wettkampffahrern und sehr guten Freestylern zum Einsatz kommt. Bei den vorwiegend Unhooked- (ausgehakten) Tricks soll der Kite möglichst immer gleich reagieren – unabhängig davon, wie sehr er vor dem Trick über den Adjuster getrimmt wurde.
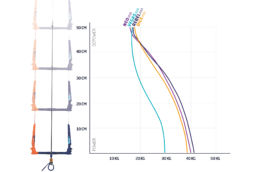
Somit erklärt sich der sehr lineare Kraftverlauf in der Steuerleine in den ersten 25 Zentimetern Depower-Weg. Damit ist sichergestellt, dass sowohl das Bargefühl beim Einlenken als auch der Pop beim Absprung über einen weiten Bereich nahezu gleichbleibt. Im Vergleich dazu ist klar zu erkennen, dass der Dice mit seinem eher moderaten C-Shape wesentlich weniger extrem designt wurde. Den linearen Kraftauf- und -abbau hat er vom Vegas übernommen, jedoch nicht den beschränkten Einsatzbereich. Dieser liegt in etwa auf der Höhe von Neo und Rebel, was ihn wesentlich kommerzieller macht.
Ausblick für die Zukunft
Reichen uns die aufgezeigten Daten aus, um die Kites ganzheitlich voneinander zu separieren? Klare Antwort: Nein. Unerlässlich zur objektiven Validierung der Flugeigenschaften sind dynamische Manöver wie Einlenkverhalten oder Drehradien. Die in diesem Artikel gezeigten Daten reichen nicht aus, um daraus eine Kaufentscheidung abzuleiten oder die Kites wirklich voneinander zu unterscheiden. Sie zeigen aber in aller Deutlichkeit, dass die Messwerte einen großen Beitrag bei der Entwicklung von Kites leisten können. So werden nicht nur die offensichtlich sichtbaren Unterschiede zwischen den Kite-Modellen wie Vegas und Dice aufgezeigt, es wird vielmehr ein allgemeines Verständnis für die Flugphysik von Kites, also von flexiblen Tragflächen, aufgezeigt.
Mehr Infos zu TETA:
Diese Artikel könnten dich ebenfalls interessieren

Thermik-Saison voraus
Wind für LangschläferIm späten Frühling und frühen Sommer schenken uns Hochdrucklagen eine Extraportion Wind.…

Ein Sturm wird kommen
Ratgeber: Wind und Wetterwetterkarten verstehenWind bedeutet Faszination, eine gute Zeit auf dem Wasser –…

Neue Video-Tutorials
Surfschule Norddeich mit neuen Lern- und Ratgeber-VideosWir haben euch schon früher immer mal wieder…

Mein erstes Mal: Wingfoilen
Alle fliegen aufs Wingfoilen. The hype is real – zumindest wenn man Herstellern und…

Kein Frust trotz Frost: 10 Tipps für Kiten im Winter
Mit etwas Vorbereitung und den richtigen Tricks können Kitesessions im Winter ihre ganz…

Kluge Kleidung: Neo und Ausrüstung für die kalten Monate
Wer im Winter kiten will, muss sich warm anziehen. Mit klappernden Zähnen, blauen…